昨天介紹了 DeepLab 架構的特別之處後,今天要來分享 DeepLab 的第二個版本 — DeepLabv2
DeepLabv2 與先前的第一個版本相比,變化並不大,整體架構仍然維持不變,一樣是結合了深度卷積神經網路和條件隨機場,並進行後處理以平滑邊緣。然而,它的主要特色在於卷積層的末尾使用了一項新技術:Atrous Spatial Pyramid Pooling (ASPP),這個新技術的應用使得 DeepLabv2 在分割多尺度物體方面表現更出色,進一步提升了分割效果
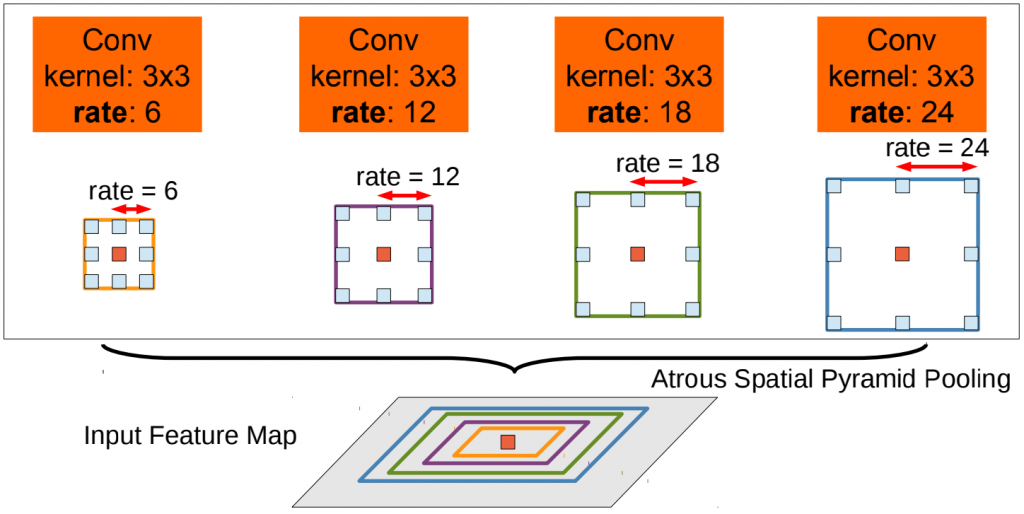
是以昨天介紹到的空洞捲積為基底組成的,ASPP 會通過不同的 dilation rates 來對給定的特徵層進行特徵萃取,也就是說,ASPP 並不會使用不同大小的捲積核,而是會讓捲積核之間的間隔改變,透過使用不同 dilation rates 的空洞卷積建構出不同感受野大小的捲積核,從而在多個尺度上捕獲物件以及有用的影像上下文資訊
這種方法的精髓在於它不會實際對特徵進行重新採樣,而是使用具有不同 dilation rates 的多個平行空洞卷積層提取特徵,然後將這些特徵融合在一起,從而實現